Two visualizing proofs of the Pythagorean theorem
The Pythagorean theorem is one of the most proved theorem of all time, most of the proofs use manipulation of areas to prove that the square of the hypotenuse is indeed the sum of the squares of the two legs. I often felt disconnected with the proofs, it was one of the situations where I could prove something, but could not quite see why. So here let me present two methods of proving the Pythagorean theorem that are hopefully direct, dynamical and visualizing.
1 The question
The problem to solve here is quite straight forward: given two side lengths and , let them form a right-angled triangle, with and the legs. Then what is the length of the hypotenuse ?
2 The first method
Although we do not know the length of , we can nevertheless draw a graph containing it. Given a right-angled triangle with c as the hypotenuse, and point as the vertex between and ,

let rotate clockwise about , until overlaps with a(so rotate from to ). Now the trick is, during this rotation we will trace the horizontal projection of , or the projection of onto the line containing . Clearly, before the rotation starts, the horizontal projection of is just , but as starts rotating, its horizontal projection grows larger, and when finally overlaps with , its projection will be equal to itself, , which is exactly what we are trying to calculate. The dotted line in the figure above shows the total horizontal increment gained from this rotation.
2.1 The setup
Rotation or circular movement can be approximated by some finite amount of linear motions. For example, if an object always moves in a straight line for a short distance, before readjusting its direction of motion such that the direction of motion is always perpendicular to the radius at that point, then such movement can be a good approximation for a circular motion. The more frequent it adjusts its direction of motion, the closer to a circular motion it will be.
Now let us approximate the rotation of the hypotenuse with 5 linear motions, call it the 5-step-rotation, in the following figure,

So took 5 linear movements to "rotate'' downward to "become'' . Of course does not equal to as it was not a perfect rotation, so radius is not conserved. Although, it was still a decent approximation, and the final horizontal projection, in this case would be , is the approximated hypotenuse by this 5-step-rotation.
Now let us generalize this setup by defining the number of tangent segments taken to be , the vertical component of each tangent segment then will be , and the larger is the closer it is to a circular motion. If tends to infinity, this movement of to becomes a perfect rotation, the infinite amount of tangent segments together become an arc, and the final horizontal projection would exactly be equal to the hypotenuse .
2.1 Find the pattern
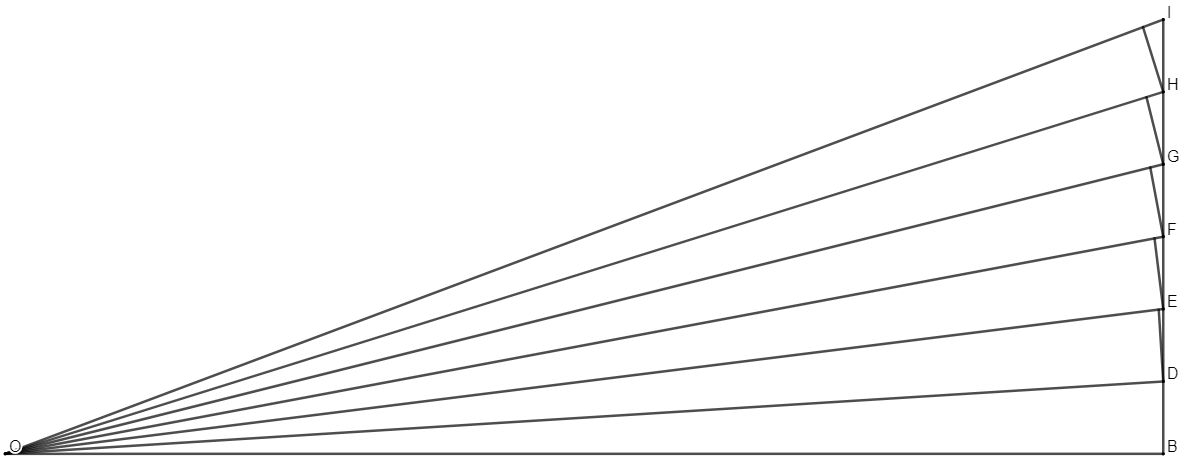
For the general case , let us go ahead and calculate the horizontal projection. To make things easier, as the downward components of all tangent segments are , we can just write it as Δ. Now let us look at the first tangent movement,

the original horizontal projection before the first tangent movement is just , then the first tangent movement adds to the horizontal projection. As triangle is similar to triangle (because ), first horizontal increment is,
now after the first movement, at the new point , let us denote the vertical component and horizontal component of by and respectively,
so the horizontal projection after the first step is a'. Now let us look at the second tangent movement,

the horizontal increment can again be obtained by similar triangles,
again at the new point F, denote the vertical and horizontal components of by and ,
so the horizontal projection after the second step is a''. Now to the third tangent movement,

by similar triangles, the third horizontal increment is,
once more at the new point H, denote the vertical and horizontal components of by and ,
so the horizontal projection after the third tangent movement is . No need to continue with calculating more tangent movements, one should be able to see the pattern at this stage: the next horizontal increment is always times the ratio between the vertical component and horizontal component at that point. Inductively:
And after all steps we would get the final horizontal projection as . Now let us observe the series of these horizontal increments:
ignore the for now as every term has one. The series clearly is decreasing as the numerator is decreasing while the denominator is increasing. The numerator is pretty straight forward as it is just linearly decreasing by every term. While the denominator, is always the horizontal projection of the last term. In other words, in every step, a horizontal increment is added to the original horizontal projection, and this added increment makes the next horizontal increment smaller because of enlarged denominator by itself.
2.3 The merging triangles model
Now should the behavior of the denominator in some way remind us of wrapping elastic bands on to a tube? If there are some identical elastic bands to be wrapped layer by layer onto a large tube, as more elastic bands are put onto the tube, the resulting radius of the tube becomes larger as these elastic bands add thickness to the tube. At the same time, because the radius of the tube is larger, the next elastic band must be stretched further to be put onto the tube, as a result the elastic band must be thinner, hence will increase the radius of the tube by less amount. By the same reason the next elastic bands put on will only contribute less and less radius increments.
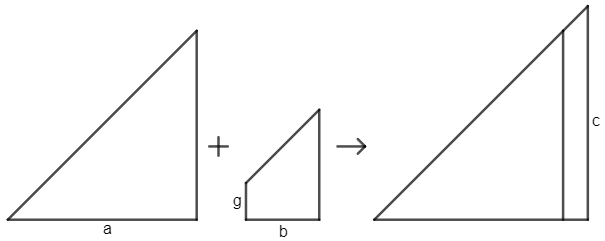
This analogy mimic the behavior of the denominator, but we still need the numerator to decrease linearly by . The correct model is, the merging triangles model, that is to merge two isosceles right-angled triangles into a bigger one. Like before, we could approximate this process by an N-step approximation.

The figure above shows the N=6 case, the triangle to the left, call it the base triangle, has side length , and the "triangle'' to the right has "side length'' . Of course the triangle to the right is not a real triangle, it is actually made of N rectangular slices(6 slices in the figure). These slices all have width =b/N, and their height, from left to right, are b, b-, b-2,...,b-(N-1), so the height of these slices linearly decreases by . To make things easier to see, let us just denote the height of these slices, from left to right by , , ,...,, and they are connected by the relation . Now as for the problem of the "triangle'' to the right not being a real triangle but just N slices, without doing the proof in details, it should be fairly obvious that if the number of slices, or simply N, tends to infinity, all the slices become infinitesimally thin and they together form a perfect isosceles right-angled triangle with side length b, so it will be a real triangle in the limiting case.
Now to merge the two triangles together into a bigger one, we will do it slice by slice. First, merge the first slice(the tallest slice) to the base triangle.

This slice has height but the base triangle has height , to glue this slice on we will first stretch the height of the slice to be , as the area of the slice must be preserved, the width of the slice must be shrunk to . The resulting shape,

is almost an isosceles right-angled triangle, apart from a little triangle missing at the top. No need to worry about it now though, just ignore it and proceed. So the base "triangle" now has side length , and let us denote it as ;
Now we merge the second slice, this slice has height , and the base triangle now has side length or , so this slice needs to be stretched from in height to in height, then glued on:

as a consequence, the width of this slice is shrunk to , and the resulting "isosceles right angled triangle'' now has side length , let's call it ,

again another small triangle is missing at the top, and again we will just ignore it for now. Now add the third slice,

the third slice has height or , and the base triangle now has side length , so the slice must be stretched from in height to in height, hence its width is shrinked to . After it is glued on, the resulting "triangle" now has side length , let us call it .
Needless to glue more slices in specific, the pattern should be clear by now. We continue gluing after all slices being glued on and the result would be a right-angled triangle with side length . Now review the rotating hypotenuse case, we should be able to see the variables and math expressions of this merging triangles model being exactly the same as those of the rotating hypotenuse model, in a way that the side length of the resulting right angled-triangle evolves exactly the same way as the horizontal component of the hypotenuse, which means that the horizontal projection of the hypotenuse after the N-step rotation can alternatively be found by calculating the side length of the resulting triangle, after the N-step merging. Finally, for the merging triangles model, if , then , and there would be no missing little triangles anymore as the area of those little triangles are of the order ,

so in the limiting case both the triangle cut into slices and the resulting triangle become legitimate isosceles right-angled triangle, and if we denote the side length of the resulting triangle by c,
or . On the other hand, when , the horizontal projection of the hypotenuse after the N-step-rotation, which equals to the hypotenuse itself, is also . What interesting about the square root operation here is that it compromises the infinite amount of merging slice actions into just one nice operation, in our case anyway. It is also probably one of the reasons why the square root of a number is usually an irrational number. Now a conclusive figure to put the two models together:

The limiting case where it would look like:

2 The second method
Now, if one still feels that the first method is not quite direct and intuitive enough, as one could claim we did not find the actual hypotenuse, we only found the horizontal projection of the hypotenuse after rotating it down manually, well in that case the second method might just be a better choice. The mathematical expressions for the second method will be almost the same as in the first method, the difference comes from the modelling of the dynamics. So this time we will focus more on the setup side and skip some steps that are similar to the first method.
3.1 The setup
The initial state of this method looks like this: side lies horizontally as it is, but side is 0. Then we let side be the hypotenuse and rotate upward as increases its height, and at the same time side pick up extra lengths as it rotates upward,

and yes we will use the N step approximation again, so side will take steps, each step by to grow from 0 to in height. The hypotenuse in every step is then calculated inductively(like the horizontal projection in the first method), and the hypotenuse after steps would be the desired hypotenuse for triangle , or at least an -step approximation. So in the first method, we let the vertical component start from then decrease per step, and become 0 at the end, while in this method it is the opposite, the vertical component starts from 0, increases per step and becomes at the end. The case would look like:





.png)
Really interesting to see such an illustrative proof. It gives an intuitive picture of what's going on behind the formula. Looking forward to learning more from your future posts!
ReplyDelete